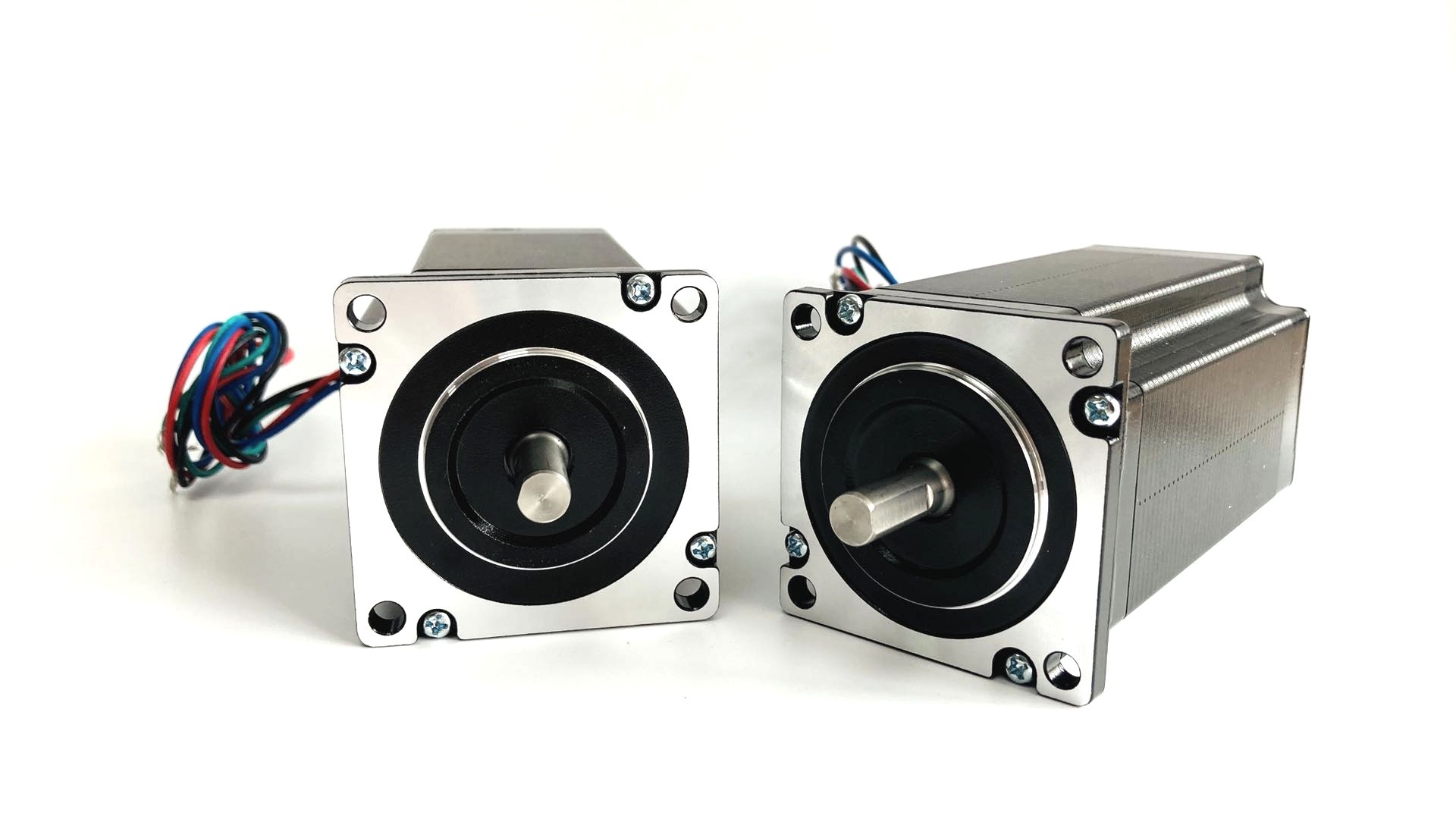
NEMA23 มอเตอร์สเต็ปปิ้ง 2 เฟส 57 มม. มอเตอร์ไฮบริด 1.8 องศา
คำอธิบายของมอเตอร์สเต็ปไฮบริด NEMA23
1. การควบคุมตำแหน่งที่ถูกต้อง
การกระจัดเชิงมุมของสเต็ปปิ้งมอเตอร์สามารถควบคุมได้อย่างแม่นยำด้วยจำนวนพัลส์ไฟฟ้าความแม่นยำของมุมสามารถควบคุมได้ภายใน± 0.09 °โดยไม่ต้องใช้อุปกรณ์ป้อนกลับใด ๆ
2. ชีวิตอีกต่อไป
มอเตอร์สเต็ปปิ้งเป็นโครงสร้างเชิงกลซึ่งไม่จำเป็นต้องเปลี่ยนด้วยแปรงไฟฟ้าหรือเซ็นเซอร์ฮอลล์ซึ่งจะช่วยลดความน่าจะเป็นและเพิ่มอายุการใช้งานของมอเตอร์อายุการใช้งานของมอเตอร์สเต็ปมักกำหนดโดยอายุการใช้งานของแบริ่ง
3. มอเตอร์สเต็ปเปอร์ประหยัดแม่นยำและควบคุมง่ายและสามารถทำงานได้อย่างน่าเชื่อถือในสภาพแวดล้อมที่หลากหลาย (ขึ้นอยู่กับระดับการป้องกัน IP ที่เลือก) โดยเฉพาะอย่างยิ่งในเครื่องจักรที่มีกล่องหุ้มเพิ่มเติมหรือในสภาพแวดล้อมที่สะอาด
4. การควบคุมความเร็วที่แม่นยำ
สามารถควบคุมความเร็วในการหมุนของสเต็ปปิ้งมอเตอร์ได้อย่างแม่นยำโดยการควบคุมความถี่ของพัลส์ไฟฟ้า
ข้อมูลจำเพาะของมอเตอร์ไฮบริดสเต็ปเปอร์

- ความแม่นยำในการก้าว: ± 5%
- ความต้านทานความแม่นยำ: ± 10%
- ความแม่นยำของตัวเหนี่ยวนำ: ± 20%
- อุณหภูมิเพิ่มขึ้น: 80 ° C สูงสุด
- อุณหภูมิแวดล้อม: -20 ° C ... + 50 ° C
- ความต้านทานฉนวน: 100MOhm นาที500 โวลต์ DC
- ทนต่อ: 500V AC, 1 นาที
| หมายเลขโหมด |
PST57H265-4P20 |
PST57H265-4P30
|
PST57H265-4L40 |
| ถือแรงบิด |
1.7 นาโนเมตร |
| ที่เกี่ยวข้องในปัจจุบัน |
2A / เฟส |
3A / เฟส |
4A / เฟส |
| ความต้านทาน |
2 Ω / เฟส |
0.9Ω / เฟส |
0.5Ω / เฟส |
| ตัวเหนี่ยวนำ |
6MH / เฟส |
2.7MH / เฟส |
1.6MH / เฟส |
| ความเฉื่อย |
280 ก. ซม 2 |
| น้ำหนัก |
0.72 กก |
| ความยาว |
55.5 มม |
| การเชื่อมต่อ |
ป |
| หมายเลขโหมด |
PST57H276-4P30 |
PST57H276-4L40
|
PST57H276-4L50 |
| ถือแรงบิด |
2 น |
| ที่เกี่ยวข้องในปัจจุบัน |
3A / เฟส |
4A / เฟส |
5A / เฟส |
| ความต้านทาน |
1.1Ω / เฟส |
0.65Ω / เฟส |
0.37Ω / เฟส |
| ตัวเหนี่ยวนำ |
4.2MH / เฟส |
2.35MH / เฟส |
1.8MH / เฟส |
| ความเฉื่อย |
480g.cm2 |
| น้ำหนัก |
1.1 กก |
| ความยาว |
76.5 มม |
| การเชื่อมต่อ |
ป |
ล |
การใช้งาน Stepper Motor 1.8 องศา
สเต็ปเปอร์มอเตอร์มีความหลากหลายในการใช้งาน แต่สิ่งที่พบมากที่สุด ได้แก่ :
- อุปกรณ์การพิมพ์ 3 มิติ
- เครื่องจักรสิ่งทอ
- แท่นพิมพ์
- เครื่องเล่นเกม
- เครื่องจักรถ่ายภาพทางการแพทย์
- หุ่นยนต์ขนาดเล็ก
- เครื่องกัด CNC
- อุปกรณ์เชื่อม
กำหนดเอง Shaft และรายละเอียดการติดตั้ง:
มอเตอร์ทั้งหมดสามารถใช้กับเพลาปลายเดี่ยวหรือคู่ตามความยาวของเพลาตามคำขอของลูกค้าและขนาดอื่น ๆ ยังสามารถปรับเปลี่ยนได้ตามต้องการ
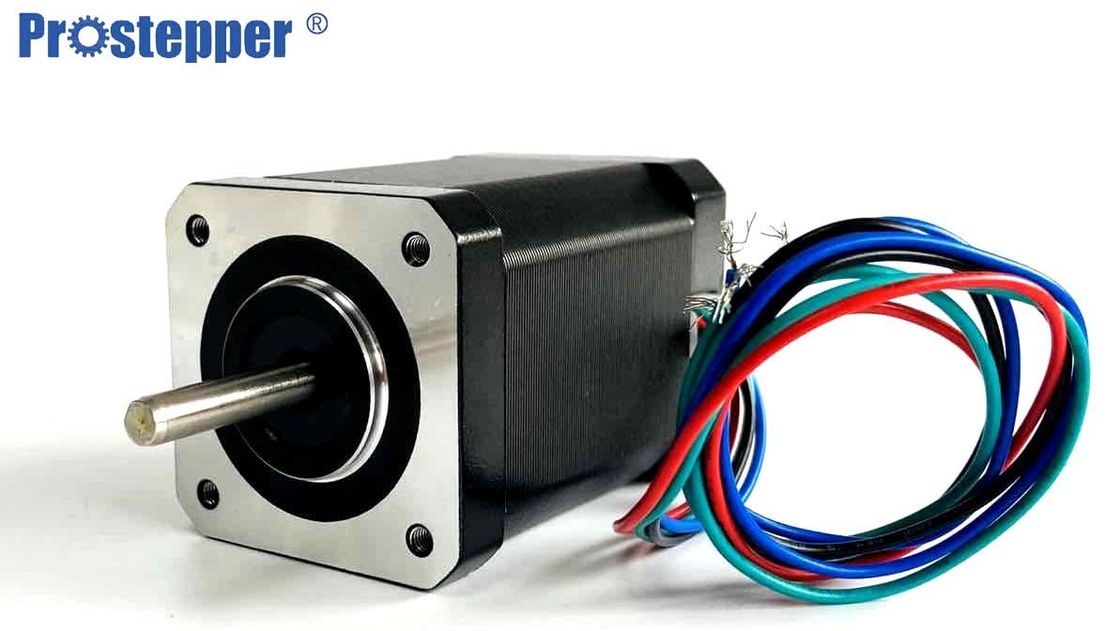
จำนวนโอกาสในการขาย:
มอเตอร์ทั้งหมดสามารถจัดหาได้ด้วยสายนำ 4, 5, 6 หรือ 8 และหากต้องการตัวเชื่อมต่อสามารถจัดหาให้กับมอเตอร์ของเราตามคำขอของลูกค้า
รหัสที่คดเคี้ยว:
เนื่องจากคำขอของลูกค้าแต่ละรายอาจแตกต่างกันเราจึงแสดงรายการเฉพาะผลิตภัณฑ์มาตรฐานของเราในแคตตาล็อกนี้อย่างไรก็ตามเรายินดีเสนอรูปแบบอื่น ๆ ตามคำขอของคุณ
ถือแรงบิด:
แรงบิดในการจับถือวัดด้วยสองเฟสที่ให้มาที่กระแสไฟฟ้าที่กำหนดข้อกำหนดทางเทคนิคที่แนบมาจึงเป็นเรื่องปกติ
(ตามคำขอของลูกค้าสำหรับเพลาพิเศษโอกาสในการขายตัวยึด ฯลฯ เราจะให้รหัส / ตัวระบุผลิตภัณฑ์เฉพาะแก่คุณ)
การคดเคี้ยวในบทความนี้คือ 4 Wire Bipolar
มอเตอร์ Stepper แบบไฮบริด 0.9 °และ 1.8 °
1.8 ° Step Angle มอเตอร์เข้ากันได้โดยตรงกับบอร์ดไดรฟ์สเต็ปเปอร์มอเตอร์และยังขับเคลื่อนมอเตอร์อย่างใดอย่างหนึ่ง (ถ้าจำเป็น) ในโหมดครึ่งขั้นตอนคือ 0.9 °ต่อขั้นตอนทำให้ได้ความละเอียดสูงขึ้นเสถียรภาพในการทำงานที่มากขึ้นและอัตราการก้าวที่เร็วทิศทางความเร็วความเร่ง / การลดความเร็วสามารถควบคุมได้โดยตัวควบคุมสเต็ปเปอร์มอเตอร์การใช้ลำดับพัลส์ไฟฟ้าที่ถูกต้องกับขดลวดของมอเตอร์สเต็ปเปอร์ส่งผลให้แกนหมุนหมุนมุม 1.8 ° (กล่าวคือ 200 ขั้นต่อรอบ)เมื่อโหลดและขับเคลื่อนอย่างถูกต้องมอเตอร์เหล่านี้จะสร้างขั้นตอนเอาต์พุตที่ไม่ต่อเนื่องจำนวนก้าวและความเร็วในการหมุนจะพิจารณาจากจำนวนพัลส์และความถี่ของสัญญาณอินพุตนี่เป็นวิธีที่เหมาะสำหรับการควบคุมความเร็วและตำแหน่งมอเตอร์เข้ากันได้โดยตรงกับบอร์ดไดรฟ์สเต็ปเปอร์มอเตอร์
 ข้อความของคุณจะต้องอยู่ระหว่าง 20-3,000 ตัวอักษร!
ข้อความของคุณจะต้องอยู่ระหว่าง 20-3,000 ตัวอักษร!